| img | ||
| include | ||
| lib | ||
| src | ||
| .clang-format | ||
| .gitignore | ||
| build.py | ||
| LICENSE | ||
| platformio_orig.ini | ||
| README.md | ||
ESP32-Paxcounter
Wifi & Bluetooth driven, LoRaWAN enabled, battery powered mini Paxcounter built on cheap ESP32 LoRa IoT boards
Tutorial (in german language): https://www.heise.de/select/make/2019/1/1551099236518668


Use case
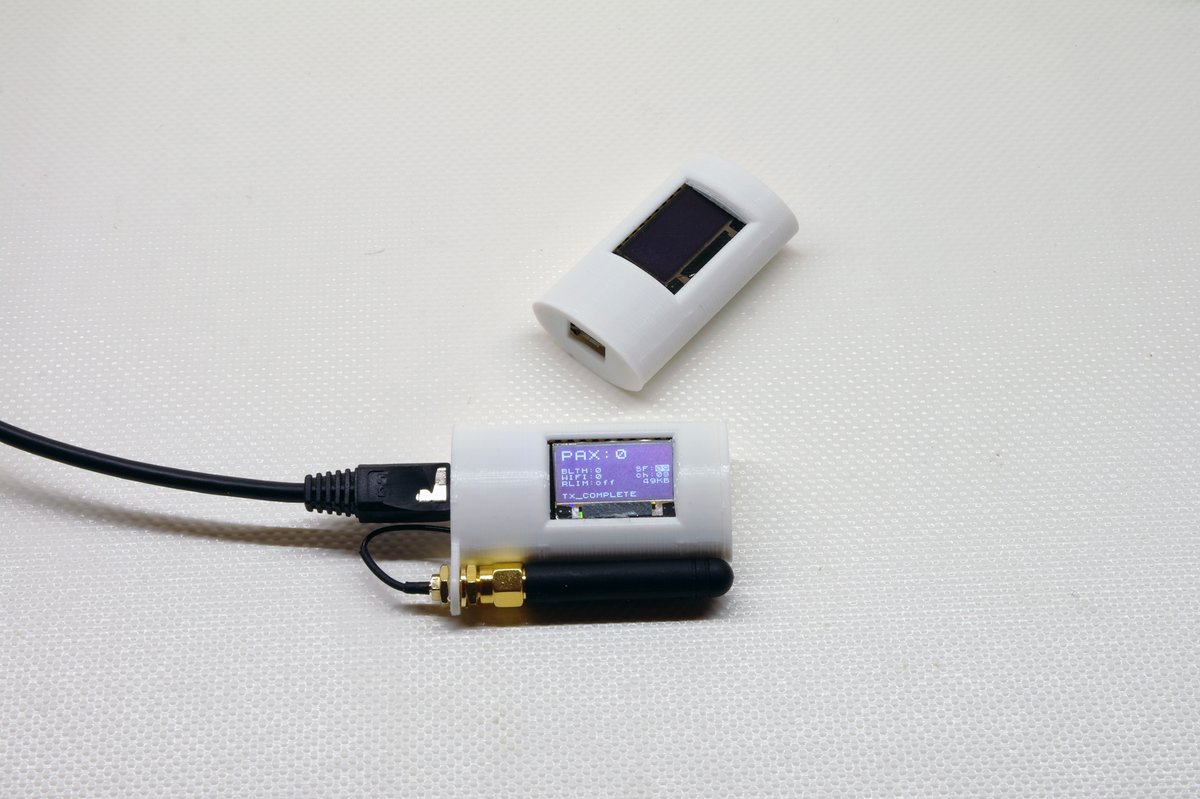
Paxcounter is an ESP32 MCU based device for metering passenger flows in realtime. It counts how many mobile devices are around. This gives an estimation how many people are around. Paxcounter detects Wifi and Bluetooth signals in the air, focusing on mobile devices by evaluating their MAC adresses.
Intention of this project is to do this without intrusion in privacy: You don't need to track people owned devices, if you just want to count them. Therefore, Paxcounter does not persistenly store MAC adresses and does no kind of fingerprinting the scanned devices.
Data can either be be stored on a local SD-card, transferred to cloud using LoRaWAN network or MQTT over TCP/IP, or transmitted to a local host using serial (SPI) interface.
You can build this project battery powered using ESP32 deep sleep mode and reach long uptimes with a single 18650 Li-Ion cell.
Hardware
Supported ESP32 based boards:
LoRa & SPI:
- Heltec: LoRa-32 v1 and v2
- TTGO: T1*, T2*, T3*, T-Beam, T-Fox
- Pycom: LoPy, LoPy4, FiPy
- Radioshuttle.de: ECO Power Board
- WeMos: LoLin32 + LoraNode32 shield, LoLin32lite + LoraNode32-Lite shield
- Adafruit ESP32 Feather + LoRa Wing + OLED Wing, #IoT Octopus32 (Octopus + ESP32 Feather)
- M5Stack: Basic Core IoT* + Lora Module RA-01H, Fire IoT*
*) supports microSD-card
SPI only:
- Pyom: WiPy
- WeMos: LoLin32, LoLin32 Lite, WeMos D32, Wemos32 Oled
- Crowdsupply: TinyPICO
- TTGO: T-Display
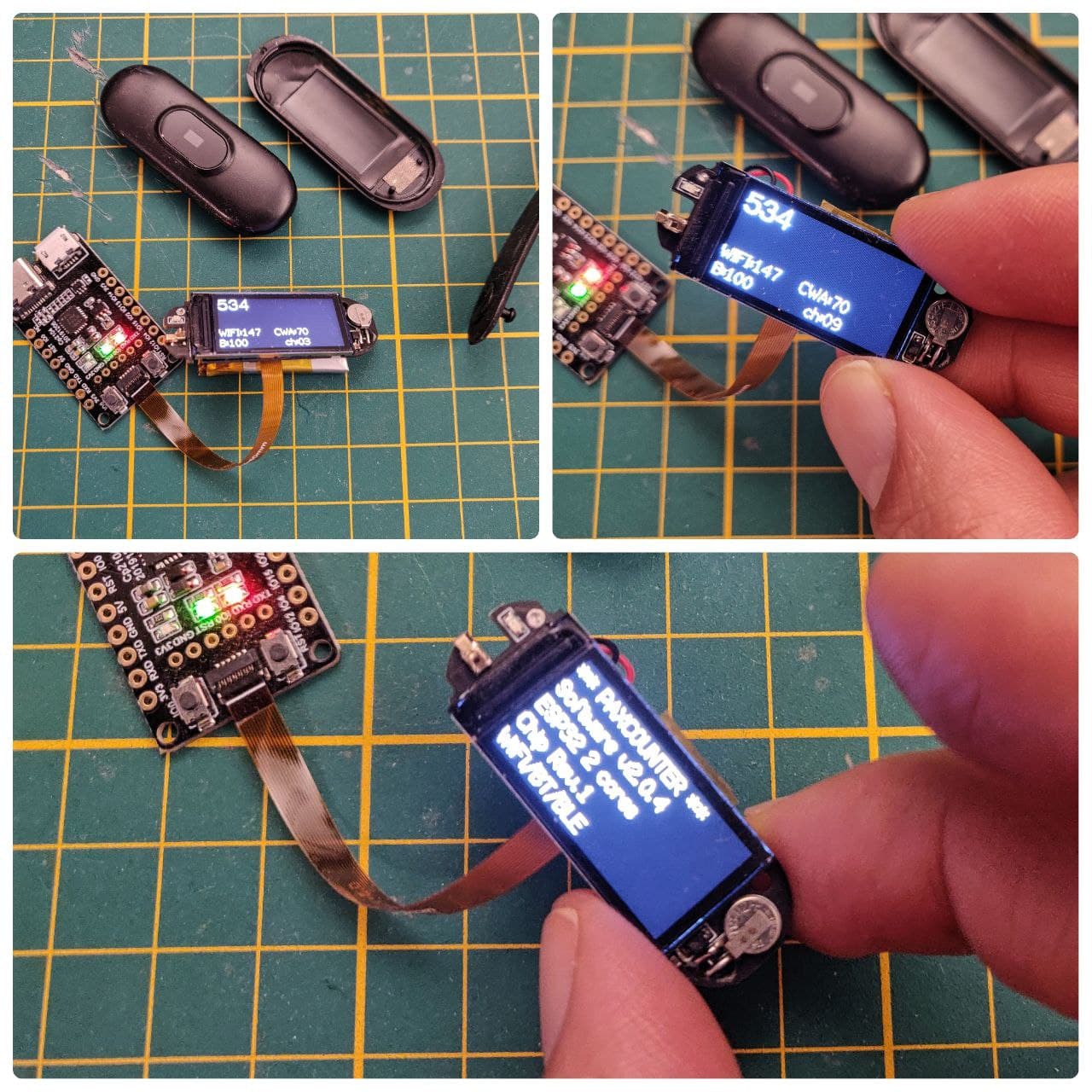
- TTGO: T-Wristband
- Generic ESP32
Depending on board hardware following features are supported:
- LoRaWAN communication, supporting various payload formats (see enclosed .js converters)
- MQTT communication via TCP/IP and Ethernet interface (note: payload transmitted over MQTT will be base64 encoded)
- SPI serial communication to a local host
- LED (shows power & status)
- OLED Display (shows detailed status)
- RGB LED (shows colorized status)
- Button (short press: flip display page / long press: send alarm message)
- Battery voltage monitoring (analog read / AXP192 / IP5306)
- GPS (Generic serial NMEA, or Quectel L76 I2C)
- Environmental sensors (Bosch BMP180/BME280/BME680 I2C; SDS011 serial)
- Real Time Clock (Maxim DS3231 I2C)
- IF482 (serial) and DCF77 (gpio) time telegram generator
- Switch external power / battery
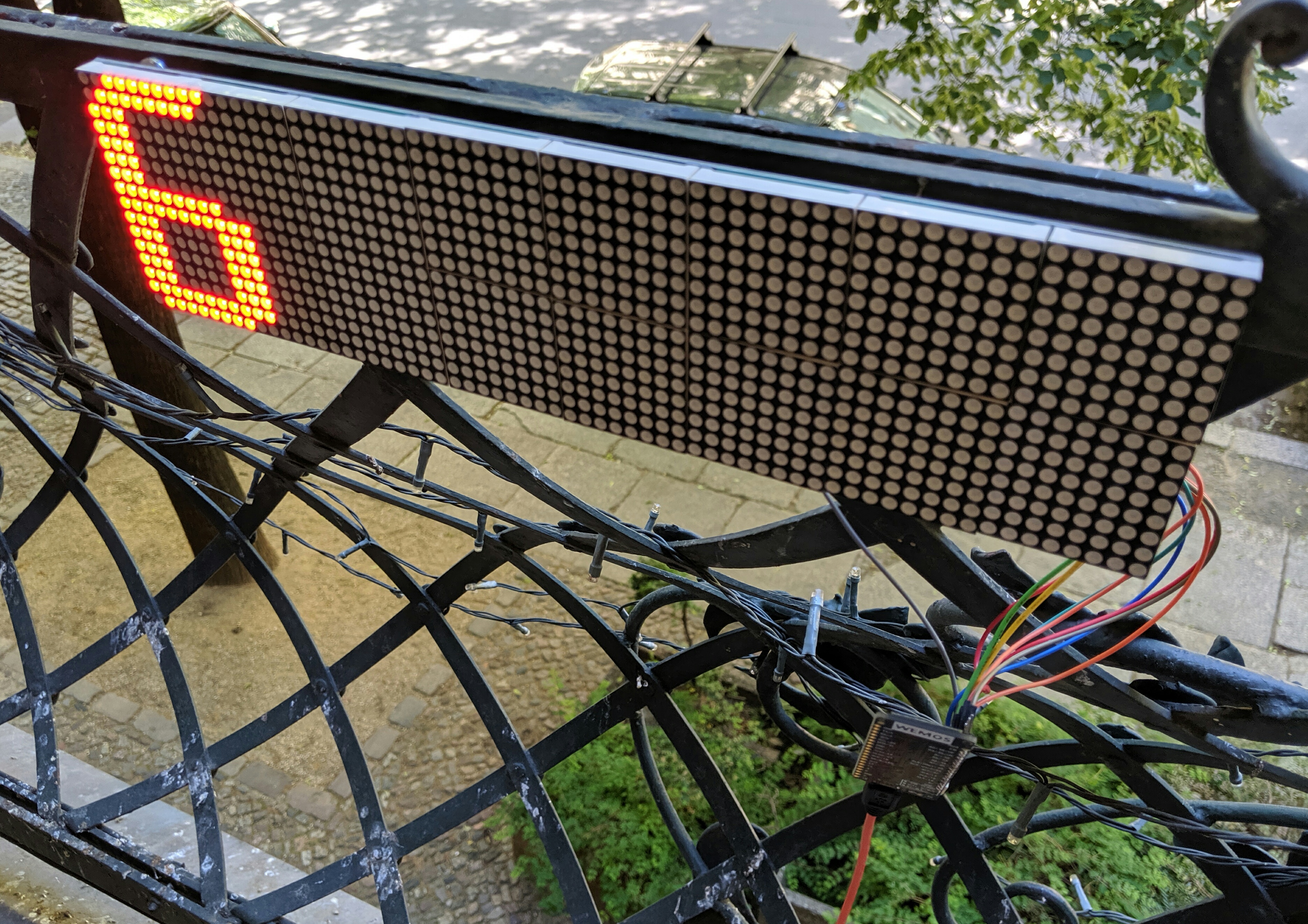
- LED Matrix display (similar to this 64x16 model, can be ordered on Aliexpress)
- SD-card (see section SD-card here) for logging pax data
Target platform must be selected in platformio.ini.
Hardware dependent settings (pinout etc.) are stored in board files in /hal directory. If you want to use a ESP32 board which is not yet supported, use hal file generic.h and tailor pin mappings to your needs. Pull requests for new boards welcome.
Some 3D printable cases can be found (and, if wanted so, ordered) on Thingiverse, see
Heltec,
TTGOv2,
TTGOv2.1,
TTGO,
T-BEAM,
T-BEAM parts,
for example.
Power consumption was metered at around 450 - 1000mW, depending on board and user settings in paxcounter.conf. By default bluetooth sniffing not installed (#define BLECOUNTER 0 in paxcounter.conf). Installing and enabling bluetooth costs 30% more power + 30% flash storage for the software stack. If you enable bluetooth be aware that this goes on expense of wifi sniffing results, because then wifi and bt stack must share the 2,4 GHz RF ressources of ESP32. If you need to sniff wifi and bt in parallel and need best possible results, use two boards - one for wifi only and one for bt only - and add counted results.
Preparing
Install Platformio
Install PlatformIO IDE for embedded development to make this project. Platformio integrates with your favorite IDE, choose eg. Visual Studio, Atom, Eclipse etc.
Compile time configuration is spread across several files. Before compiling the code, edit or create the following files:
platformio.ini
Edit platformio_orig.ini and select desired hardware target in section boards. To add a new board, create an appropriate hardware abstraction layer file in hal subdirectory, and add a pointer to this file in sections board. Copy or rename to platformio.ini in the root directory of the project. Now start Platformio. Note: Platformio is looking for platformio.ini in the root directory and won't start if it does not find this file.
paxcounter.conf
Edit src/paxcounter_orig.conf and tailor settings in this file according to your needs and use case. Please take care of the duty cycle regulations of the LoRaWAN network you're going to use. Copy or rename to src/paxcounter.conf.
If your device has a real time clock it can be updated bei either LoRaWAN network or GPS time, according to settings TIME_SYNC_INTERVAL and TIME_SYNC_LORAWAN in paxcounter.conf.
src/lmic_config.h
Edit src/lmic_config.h and tailor settings in this file according to your country and device hardware. Please take care of national regulations when selecting the frequency band for LoRaWAN.
src/loraconf.h
Create file src/loraconf.h using the template src/loraconf_sample.h and adjust settings to use your personal values. To join the network and activate your paxcounter, you must configure either OTAA or ABP join method. You should use OTAA, whenever possible. To understand the differences of the two methods, this article may be useful.
To configure OTAA, leave #define LORA_ABP deactivated (commented). To use ABP, activate (uncomment) #define LORA_ABP in the file src/loraconf.h.
The file src/loraconf_sample.h contains more information about the values to provide.
src/ota.conf
Create file src/ota.conf using the template src/ota.sample.conf and enter your WIFI network&key. These settings are used for downloading updates via WiFi, either from a remote https server, or locally via WebUI. If you want to use a remote server, you need a PAX.express repository. Enter your PAX.express credentials in ota.conf. If you don't need wireless firmware updates just rename ota.sample.conf to ota.conf.
Building
Use PlatformIO with your preferred IDE for development and building this code. Make sure you have latest PlatformIO version.
Uploading
-
by cable, via USB/UART interface: To upload the code via cable to your ESP32 board this needs to be switched from run to bootloader mode. Boards with USB bridge like Heltec and TTGO usually have an onboard logic which allows soft switching by the upload tool. In PlatformIO this happenes automatically.
The LoPy/LoPy4/FiPy board needs to be set manually. See these instructions how to do it. Don't forget to press on board reset button after switching between run and bootloader mode.
The original Pycom firmware is not needed, so there is no need to update it before flashing Paxcounter. Just flash the compiled paxcounter binary (.elf file) on your LoPy/LoPy4/FiPy. If you later want to go back to the Pycom firmware, download the firmware from Pycom and flash it over.
-
over the air (OTA), download via WiFi: After the ESP32 board is initially flashed and has joined a LoRaWAN network, the firmware can update itself by OTA. This process is kicked off by sending a remote control command (see below) via LoRaWAN to the board. The board then tries to connect via WiFi to a cloud service (PAX.express), checks for update, and if available downloads the binary and reboots with it. If something goes wrong during this process, the board reboots back to the current version. Prerequisites for OTA are: 1. You own a PAX.express repository, 2. you pushed the update binary to your PAX.express repository, 3. internet access via encrypted (WPA2) WiFi is present at the board's site, 4. WiFi credentials were set in ota.conf and initially flashed to the board. Step 2 runs automated, just enter the credentials in ota.conf and set
upload_protocol = customin platformio.ini. Then press build and lean back watching platformio doing build and upload. -
over the air (OTA), upload via WiFi: If option BOOTMENU is defined in
paxcounter.conf, the ESP32 board will try to connect to a known WiFi access point each time cold starting (after a power cycle or a reset), using the WiFi credentials given inota.conf. Once connected to the WiFi it will fire up a simple webserver, providing a bootstrap menu waiting for a user interaction (pressing "START" button in menu). This process will time out after BOOTDELAY seconds, ensuring booting the device to runmode. Once a user interaction in bootstrap menu was detected, the timeout will be extended to BOOTTIMEOUT seconds. During this time a firmware upload can be performed manually by user, e.g. using a smartphone in tethering mode providing the firmware upload file.
Legal note
Depending on your country's laws it may be illegal to sniff wireless networks for MAC addresses. Please check and respect your country's laws before using this code!
(e.g. US citizens may want to check Section 18 U.S. Code § 2511 and discussion on this)
(e.g. UK citizens may want to check Data Protection Act 1998 and GDPR 2018)
(e.g. Citizens in the the Netherlands may want to read this article and this article)
Note: If you use this software you do this at your own risk. That means that you alone - not the authors of this software - are responsible for the legal compliance of an application using this or build from this software and/or usage of a device created using this software. You should take special care and get prior legal advice if you plan metering passengers in public areas and/or publish data drawn from doing so.
Privacy disclosure
Paxcounter generates identifiers for sniffed Wifi or Bluetooth MAC adresses and and collects them temporary in the device's RAM for a configurable scan cycle time (default 60 seconds). After each scan cycle the collected identifiers are cleared. Identifiers are generated by using the last 2 bytes of universal MAC adresses. Personal MAC adresses remain untouched and are not evaluated. Identifiers and MAC adresses are never transferred to the LoRaWAN network. No persistent storing of MAC adresses, identifiers or timestamps and no other kind of analytics than counting are implemented in this code. Wireless networks are not touched by this code, but MAC adresses from wireless devices as well within as not within wireless networks, regardless if encrypted or unencrypted, are sniffed and processed by this code.
LED blink pattern
Mono color LED:
- Single Flash (50ms): seen a new Wifi or BLE device
- Quick blink (20ms on each 1/5 second): joining LoRaWAN network in progress or pending
- Small blink (10ms on each 1/2 second): LoRaWAN data transmit in progress or pending
- Long blink (200ms on each 2 seconds): LoRaWAN stack error
- Single long flash (2sec): Known beacon detected
RGB LED:
- Green: seen a new Wifi device
- Magenta: seen a new BLE device
- Yellow: joining LoRaWAN network in progress or pending
- Pink: LORAWAN MAC transmit in progress
- Blue: LoRaWAN data transmit in progress or pending
- Red: LoRaWAN stack error
- White: Known Beacon detected
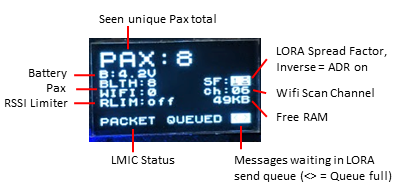
Display
If you're using a device with OLED display, or if you add such one to the I2C bus, the device shows live data on the display. You can flip display pages showing
- recent count of pax
- histogram
- GPS data
- BME sensor data
- time of day
- blank page
by pressing the button of the device.
Sensors and Peripherals
You can add up to 3 user defined sensors. Insert your sensor's payload scheme in sensor.cpp. Bosch BMP180 / BME280 / BME680 environment sensors are supported, to activate configure BME in board's hal file before build. If you need Bosch's proprietary BSEC libraray (e.g. to get indoor air quality value from BME680) further enable build_flags_sensors, which comes on the price of reduced RAM and increased build size. Furthermore, SDS011, RTC DS3231, generic serial NMEA GPS, I2C LoPy GPS are supported, and to be configured in board's hal file. See generic.h for all options and for proper configuration of BME280/BME680.
Output of user sensor data can be switched by user remote control command 0x14 sent to Port 2.
Output of sensor and peripheral data is internally switched by a bitmask register. Default mask can be tailored by editing cfg.payloadmask initialization value in configmanager.cpp following this scheme:
| Bit | Sensordata | Default |
|---|---|---|
| 0 | Paxcounter | on |
| 1 | Beacon alarm | on |
| 2 | BME280/680 | on |
| 3 | GPS* | on |
| 4 | User sensor 1 | on |
| 5 | User sensor 2 | on |
| 6 | User sensor 3 | on |
| 7 | Batterylevel | off |
*) GPS data can also be combined with paxcounter payload on port 1, #define GPSPORT 1 in paxcounter.conf to enable
Power saving mode
Paxcounter supports a battery friendly power saving mode. In this mode the device enters deep sleep, after all data is polled from all sensors and the dataset is completeley sent through all user configured channels (LORAWAN / SPI / MQTT). Set #define SLEEPCYCLE in paxcounter.conf to enable power saving mode and to specify the duration of a sleep cycle. Power consumption in deep sleep mode depends on your hardware, i.e. if on board peripherals can be switched off or set to a chip specific sleep mode either by MCU or by power management unit (PMU) as found on TTGO T-BEAM v1.0/V1.1. See power.cpp for power management, and reset.cpp for sleep and wakeup logic.
Time sync
Paxcounter can keep a time-of-day synced with external or on board time sources. Set #define TIME_SYNC_INTERVAL in paxcounter.conf to enable time sync. Supported external time sources are GPS, LORAWAN network time and LORAWAN application timeserver time. Supported on board time sources are the RTC of ESP32 and a DS3231 RTC chip, both are kept sycned as fallback time sources. Time accuracy depends on board's time base which generates the pulse per second. Supported are GPS PPS, SQW output of RTC, and internal ESP32 hardware timer. Time base is selected by #defines in the board's hal file, see example in generic.h. Bonus: If your LORAWAN network does not support network time, you can run a Node-Red timeserver application using the enclosed Timeserver code. Configure the MQTT nodes in Node-Red for the LORAWAN application used by your paxocunter device. Time can also be set without precision liability, by simple remote command, see section remote control.
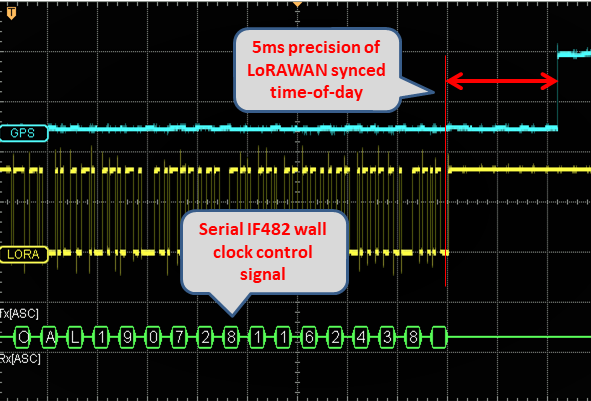
Wall clock controller
Paxcounter can be used to sync a wall clock which has a DCF77 or IF482 time telegram input. Set #define HAS_IF482 or #define HAS_DCF77 in board's hal file to setup clock controller. Use case of this function is to integrate paxcounter and clock. Accurary of the synthetic DCF77 signal depends on accuracy of on board's time base, see above.
Mobile PaxCounter using openSenseMap
This describes how to set up a mobile PaxCounter:
Follow all steps so far for preparing the device, selecting the packed payload format. In paxcounter.conf set PAYLOAD_OPENSENSEBOX to 1. Register a new sensebox on https://opensensemap.org/. In the sensor configuration select "TheThingsNetwork" and set decoding profile to "LoRa serialization". Enter your TTN Application and Device ID. Setup decoding option using [{"decoder":"latLng"},{"decoder":"uint16",sensor_id":"yoursensorid"}]
Covid-19 Exposure Notification System beacon detection
Bluetooth low energy service UUID 0xFD6F, used by Google/Apple COVID-19 Exposure Notification System, can be monitored and counted. By comparing with the total number of observed devices this gives an indication how many people staying in proximity are using Apps for tracing COVID-19 exposures, e.g. in Germany the "Corona Warn App". To achive best results with this funcion, use following settings in paxcounter.conf:
#define COUNT_ENS 1 // enable ENS monitoring function
#define BLECOUNTER 1 // enable bluetooth sniffing
#define WIFICOUNTER 0 // disable wifi sniffing (improves BLE scan speed)
#define HAS_SENSOR_1 1 // optional, in board's hal file: transmit ENS counter data to server
SD-card
Data can be stored on an SD-card if one is availabe. Simply choose the file in src/hal and add the following lines to your hal-file:
#define HAS_SDCARD 1 // SD-card-reader/writer, using SPI interface
OR
#define HAS_SDCARD 2 // SD-card-reader/writer, using SDMMC interface
// Pins for SPI interface
#define SDCARD_CS (13) // fill in the correct numbers for your board
#define SDCARD_MOSI (15)
#define SDCARD_MISO (2)
#define SDCARD_SCLK (14)
Please choose the correct number for the connection of the reader/writer.
This is an example of a board with SD-card: https://www.aliexpress.com/item/32990008126.html In this case you take the file src/hal/ttgov21new.h and add the lines given above (numbers given are for this board).
Another approach would be this tiny board: https://www.aliexpress.com/item/32424558182.html (needs 5V). In this case you choose the correct file for your ESP32-board in the src/hal-directory and add the lines given above to the correct h-file. Please correct the numbers given in the example to the numbers used corresponding to your wiring.
Some hints: These cheap devices often handle SD-cards up to 32GB, not bigger ones. They can handle files in the old DOS-way, to say the filenames are in the 8.3-format. And they often cannot handle subdirectories.
The software included here writes data in a file named PAXCOUNT.xx, where xx can range from 00 to 99. The software starts with 00, checks to see if such a file already exists and if yes it will continue with the next number (up to 99 - in this case it will return no sd-card). So an existing file will not be overwritten.
The data is written to the card and after 3 write-operations the data is flushed to the disk. So maybe the last 3 minutes of data get lost when you disconnect the PAXCOUNTER from power.
And finally: this is the data written to the disk:
date, time, wifi, bluet
00.00.1970,00:01:09,2,0
00.00.1970,00:02:09,1,0
00.00.1970,00:03:09,2,0
Format of the data is CSV, which can easily imported into LibreOffice, Excel, .....
If you want to change this please look into src/sdcard.cpp and include/sdcard.h.
Payload format
You can select different payload formats in paxcounter.conf:
-
Plain uses big endian format and generates json fields, e.g. useful for TTN console
-
Packed uses little endian format and generates json fields
-
CayenneLPP generates MyDevices Cayenne readable fields
If you're using TheThingsNetwork (TTN) you may want to use a payload converter. Go to TTN Console - Application - Payload Formats and paste the code example below in tabs Decoder and Converter. This way your MQTT application can parse the fields pax, ble and wifi.
To add your device to myDevices Cayenne platform select "Cayenne-LPP" from Lora device list and use the CayenneLPP payload encoder.
To track a paxcounter device with on board GPS and at the same time contribute to TTN coverage mapping, you simply activate the TTNmapper integration in TTN Console. Both formats plain and packed generate the fields latitude, longitude and hdop required by ttnmapper. Important: set TTN mapper port filter to '4' (paxcounter GPS Port).
Hereafter described is the default plain format, which uses MSB bit numbering. Under /TTN in this repository you find some ready-to-go decoders which you may copy to your TTN console:
plain_decoder.js | plain_converter.js | packed_decoder.js | packed_converter.js
Port #1: Paxcount data
byte 1-2: Number of unique devices, seen on Wifi [00 00 if Wifi scan disabled]
byte 3-4: Number of unique devices, seen on Bluetooth [ommited if BT scan disabled]
Port #2: Device status query result
byte 1-2: Battery or USB Voltage [mV], 0 if no battery probe
byte 3-10: Uptime [seconds]
byte 11: CPU temperature [°C]
bytes 12-15: Free RAM [bytes]
byte 16: Last CPU core 0 reset reason
bytes 17-20: Number of restarts since last power cycle
Port #3: Device configuration query result
byte 1: Lora SF (7..12) [default 9]
byte 2: Lora TXpower (2..15) [default 15]
byte 3: Lora ADR (1=on, 0=off) [default 1]
byte 4: Screensaver status (1=on, 0=off) [default 0]
byte 5: Display status (1=on, 0=off) [default 0]
byte 6: Counter mode (0=cyclic unconfirmed, 1=cumulative, 2=cyclic confirmed) [default 0]
bytes 7-8: RSSI limiter threshold value (negative) [default 0]
byte 9: Lora Payload send cycle in seconds/2 (0..255) [default 120]
byte 10: Wifi channel hopping interval in seconds/100 (0..255), 0 means no hopping [default 50]
byte 11: Bluetooth channel switch interval in seconds/100 (0..255) [efault 10]
byte 12: Bluetooth scanner status (1=on, 0=0ff) [default 1]
byte 13: Wifi antenna switch (0=internal, 1=external) [default 0]
byte 14: count randomizated MACs only (0=disabled, 1=enabled) [default 1]
byte 15: RGB LED luminosity (0..100 %) [default 30]
byte 16: 0 (reserved)
byte 17: Beacon proximity alarm mode (1=on, 0=off) [default 0]
bytes 18-28: Software version (ASCII format, terminating with zero)
Port #4: GPS data (only if device has fature GPS, and GPS data is enabled and GPS has a fix)
bytes 1-4: Latitude
bytes 5-8: Longitude
byte 9: Number of satellites
bytes 10-11: HDOP
bytes 12-13: Altitude [meter]
Port #5: Button pressed alarm
byte 1: static value 0x01
Port #6: Beacon proximity alarm
byte 1: Beacon RSSI reception level
byte 2: Beacon identifier (0..255)
Port #7: Environmental sensor data (only if device has feature BME)
bytes 1-2: Temperature [°C]
bytes 3-4: Pressure [hPa]
bytes 5-6: Humidity [%]
bytes 7-8: Indoor air quality index (0..500), see below
Indoor air quality classification:
0-50 good
51-100 average
101-150 little bad
151-200 bad
201-300 worse
301-500 very bad
Port #8: Battery voltage data (only if device has feature BATT)
bytes 1-2: Battery or USB Voltage [mV], 0 if no battery probe
Port #9: Time/Date
bytes 1-4: board's local time/date in UNIX epoch (number of seconds that have elapsed since January 1, 1970 (midnight UTC/GMT), not counting leap seconds)
Ports #10, #11, #12: User sensor data
Format is specified by user in function `sensor_read(uint8_t sensor)`, see `src/sensor.cpp`. Port #10 is also used for ENS counter (2 bytes = 16 bit), if ENS is compiled AND ENS data transfer is enabled
Remote control
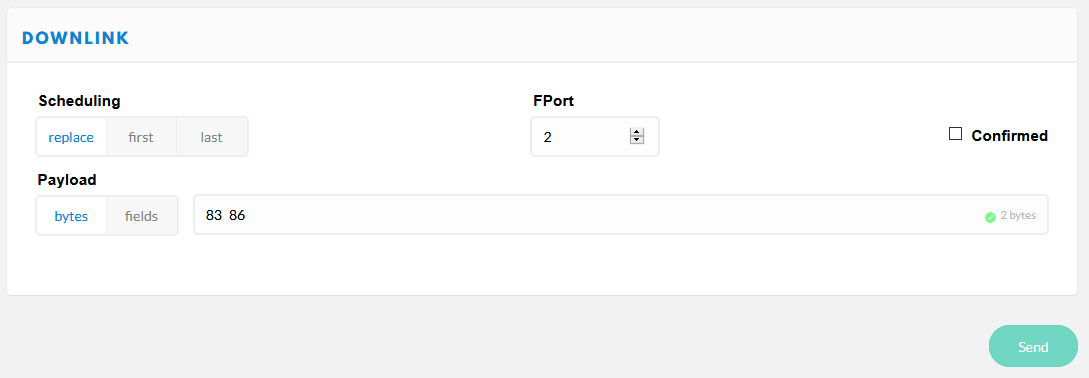
The device listenes for remote control commands on LoRaWAN Port 2. Multiple commands per downlink are possible by concatenating them, but must not exceed a maximum of 10 bytes per downlink.
Note: settings can be stored in NVRAM to make them persistant (reloaded during device startup / restart). To store settings, use command 0x21.
Send for example 83 86 as Downlink on Port 2 to get battery status and time/date from the device.
0x01 set scan RSSI limit
1 ... 255 used for wifi and bluetooth scan radius (greater values increase scan radius, values 50...110 make sense)
0 = RSSI limiter disabled [default]
0x02 set counter mode
0 = cyclic unconfirmed, mac counter reset after each wifi scan cycle, data is sent only once [default]
1 = cumulative counter, mac counter is never reset
2 = cyclic confirmed, like 0 but data is resent until confirmation by network received
0x03 set GPS data on/off
0 = GPS data off
1 = GPS data on, sends GPS data on port 4 (default, use port 1 for mobile pax counter), if GPS is present and has a fix
0x04 set display on/off
0 = display off
1 = display on [default]
0x05 set LoRa datarate
0 ... 15 see LoRaWAN regional parameters for details [default: 5]
Example for EU868:
DataRate Configuration Bit/s
0 LoRa: SF12 / 125 kHz 250
1 LoRa: SF11 / 125 kHz 440
2 LoRa: SF10 / 125 kHz 980
3 LoRa: SF9 / 125 kHz 1760
4 LoRa: SF8 / 125 kHz 3125
5 LoRa: SF7 / 125 kHz 5470
6* LoRa: SF7 / 250 kHz 11000
7* FSK: 50 kbps 50000
8 .. 14 reserved for future use (RFU)
15 ignored (device keeps current setting)
*) not supported by TheThingsNetwork
0x06 set LoRa TXpower
0 ... 255 desired TX power in dBm [default: 14]
0x07 set LoRa Adaptive Data Rate mode
0 = ADR off
1 = ADR on [default]
If ADR is set to off, SF value is shown inverted on display.
0x08 do nothing
useful to clear pending commands from LoRaWAN server quere, or to check RSSI on device
0x09 reset functions (send this command UNconfirmed only to avoid boot loops!)
0 = restart device (coldstart)
1 = (reserved, currently does nothing)
2 = reset device to factory settings and restart device
3 = flush send queues
4 = restart device (warmstart)
8 = reboot device to maintenance mode (local web server)
9 = reboot device to OTA update via Wifi mode
0x0A set payload send cycle
0 ... 255 payload send cycle in seconds/2
e.g. 120 -> payload is transmitted each 240 seconds [default]
0x0B set Wifi channel hopping interval timer
0 ... 255 duration for scanning a wifi channel in seconds/100
e.g. 50 -> each channel is scanned for 500 milliseconds [default]
0 means no hopping, scanning on channel WIFI_CHANNEL_MIN only
0x0C set Bluetooth channel switch interval timer
0 ... 255 duration for scanning a bluetooth advertising channel in seconds/100
e.g. 8 -> each channel is scanned for 80 milliseconds [default]
0x0E set Bluetooth scanner
0 = disabled
1 = enabled [default]
0x0F set WIFI antenna switch (works on LoPy/LoPy4/FiPy only)
0 = internal antenna [default]
1 = external antenna
0x10 set RGB led luminosity (works on LoPy/LoPy4/FiPy and LoRaNode32 shield only)
0 ... 100 percentage of luminosity (100% = full light)
e.g. 50 -> 50% of luminosity [default]
0x11 set beacon proximity alarm mode on/off
0 = Beacon monitor mode off [default]
1 = Beacon monitor mode on, enables proximity alarm if test beacons are seen
0x12 set or reset a beacon MAC for proximity alarm
byte 1 = beacon ID (0..255)
bytes 2..7 = beacon MAC with 6 digits (e.g. MAC 80:ab:00:01:02:03 -> 0x80ab00010203)
0x13 set user sensor mode
byte 1 = user sensor number (1..3)
byte 2 = sensor mode (0 = disabled / 1 = enabled [default])
0x14 set payload mask
byte 1 = sensor data payload mask (0..255, meaning of bits see below)
0x01 = COUNT_DATA
0x02 = ALARM_DATA
0x04 = MEMS_DATA
0x08 = GPS_DATA
0x10 = SENSOR_1_DATA (also ENS counter)
0x20 = SENSOR_2_DATA
0x40 = SENSOR_3_DATA
0x80 = BATT_DATA
bytes can be combined eg COUNT_DATA + SENSOR_1_DATA + BATT_DATA: `0x01 | 0x10 | 0x80 = 0x91`
0x15 set BME data on/off
0 = BME data off
1 = BME data on, sends BME data on port 7 [default]
0x16 set battery data on/off
0 = battery data off [default]
1 = battery data on, sends voltage on port 8
0x17 set Wifi scanner
0 = disabled
1 = enabled [default]
0x18 set ENS counter on/off
0 = disabled [default]
1 = enabled
0x19 set sleep cycle
bytes 1..2 = device sleep cycle in seconds/10 (MSB)
e.g. {0x04, 0xB0} -> device sleeps 20 minutes after each send cycle [default = 0]
0x20 load device configuration
Current device runtime configuration will be loaded from NVRAM, replacing current settings immediately (use with care!)
0x21 store device configuration
Current device runtime configuration is stored in NVRAM, will be reloaded after restart
0x80 get device configuration
Device answers with it's current configuration on Port 3.
0x81 get device status
Device answers with it's current status on Port 2.
0x83 get battery status
Device answers with battery voltage on Port 8.
0x84 get device GPS status
Device answers with it's current status on Port 4.
0x85 get BME280 / BME680 sensor data
Device answers with BME sensor data set on Port 7.
0x86 get time/date
Device answers with it's current time on Port 2:
bytes 1..4 = time/date in UTC epoch seconds (LSB)
byte 5 = time source & status, see below
bits 0..3 last seen time source
0x00 = GPS
0x01 = RTC
0x02 = LORA
0x03 = unsynched (never synched)
0x04 = set (source unknown)
bits 4..7 time status
0x00 = timeNotSet (never synched)
0x01 = timeNeedsSync (last sync failed)
0x02 = timeSet (synched)
0x87 sync time/date
Device synchronizes it's time/date by calling the preconfigured time source.
0x88 set time/date
bytes 1..4 = time/date to set in UTC epoch seconds (MSB, e.g. https://www.epochconverter.com/hex)
License
Copyright 2018-2020 Oliver Brandmueller ob@sysadm.in
Copyright 2018-2020 Klaus Wilting verkehrsrot@arcor.de
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
NOTICE: Parts of the source files in this repository are made available under different licenses, see file LICENSE.txt in this repository. Refer to each individual source file for more details.
Credits
Thanks to
- Oliver Brandmüller for idea and initial setup of this project
- Charles Hallard for major code contributions to this project
- robbi5 for the payload converter
- Caspar Armster for the The Things Stack V3 payload converter
- terrillmoore for maintaining the LMIC for arduino LoRaWAN stack
- sbamueller for writing the tutorial in Make Magazine
- Stefan for paxcounter opensensebox integration
- August Quint for adding SD card data logger, SDS011 and ENS support